Les projets
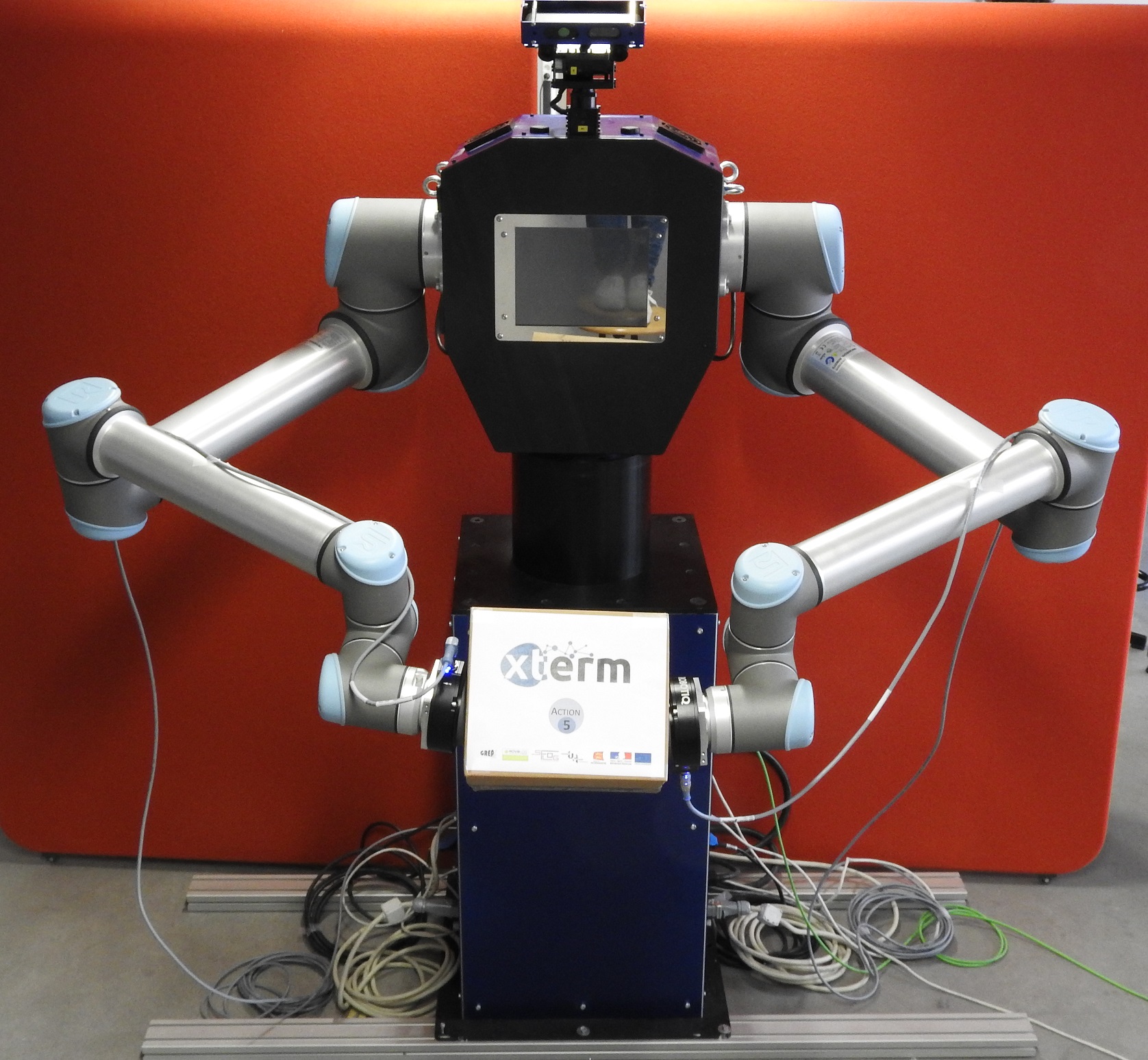
Les travaux de doctorat de M. Benali ont pour objectifs de concevoir et commander un torse humanoïde à deux bras afin de saisir et déplacer des colis de taille variable. Cette solution est beaucoup plus polyvalente que l’utilisation d’un préhenseur fixé à l’extrémité d’un bras manipulateur.
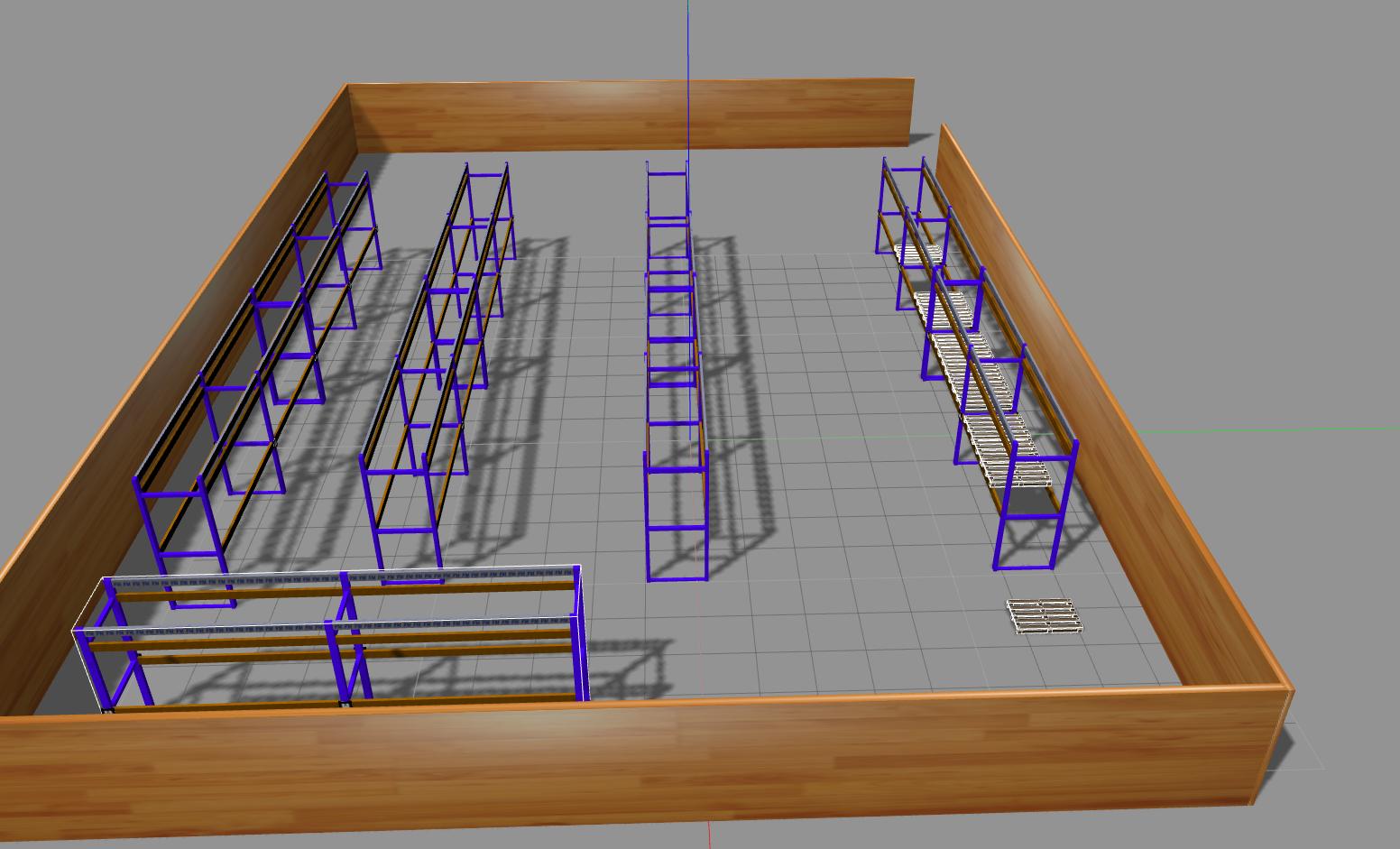
Une interface graphique permettra à un utilisateur novice de créer son entrepôt en 3D. A partir de là, il sera possible d’utiliser ce modèle dans le simulateur Gazebo de ROS pour y faire évoluer un manipulateur mobile et tester différents scénarios.
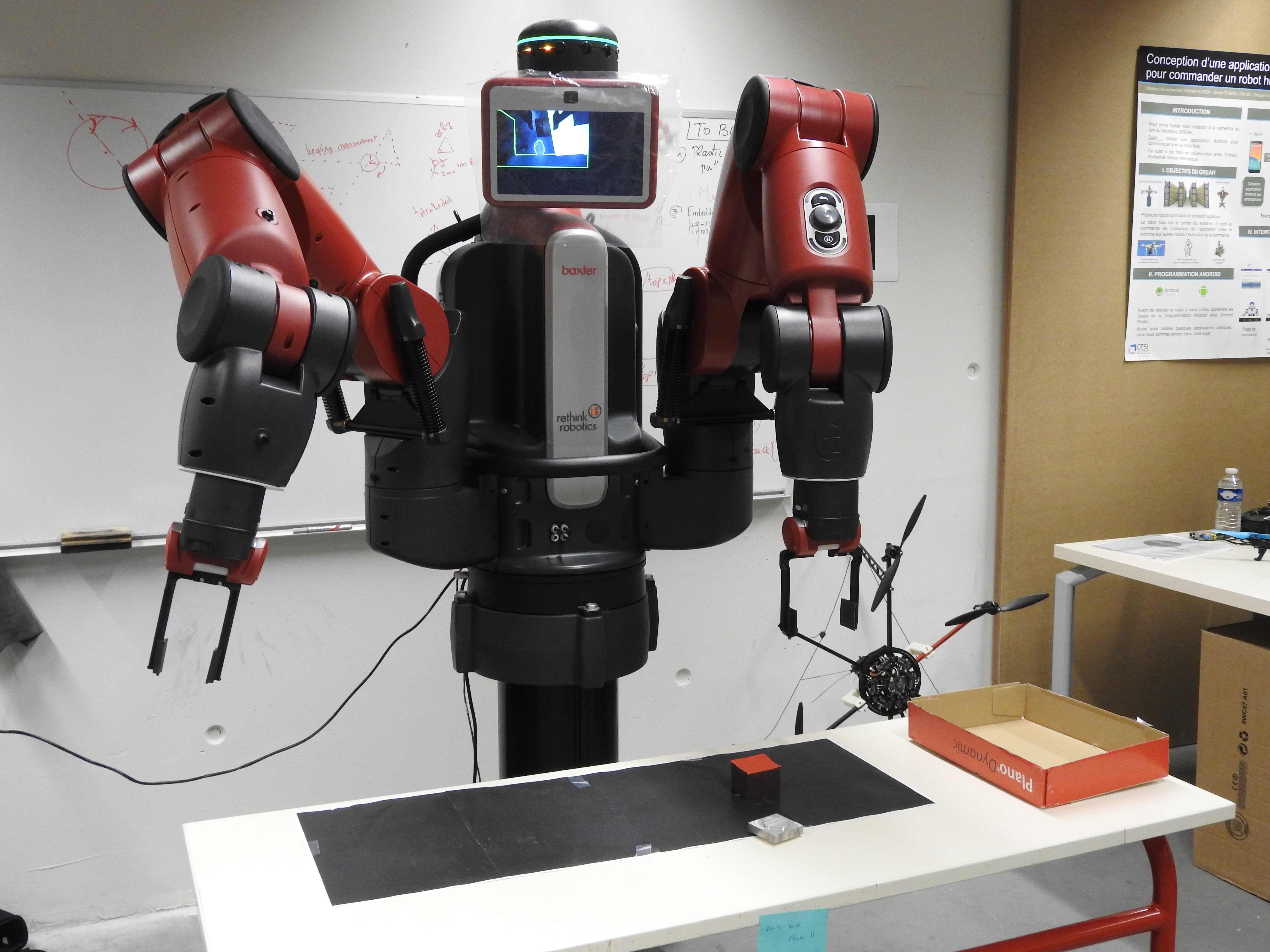
Une application robotique pour le e-commerce sera mise en place dans la halle robotique du PIL comprenant :
– Un robot Baxter qui viendra identifier et saisir des produits se déplaçant sur un convoyeur
– Un manipulateur mobile qui ira saisir l’objet désiré au niveau du rack de stockage en se déplaçant dans les allées.
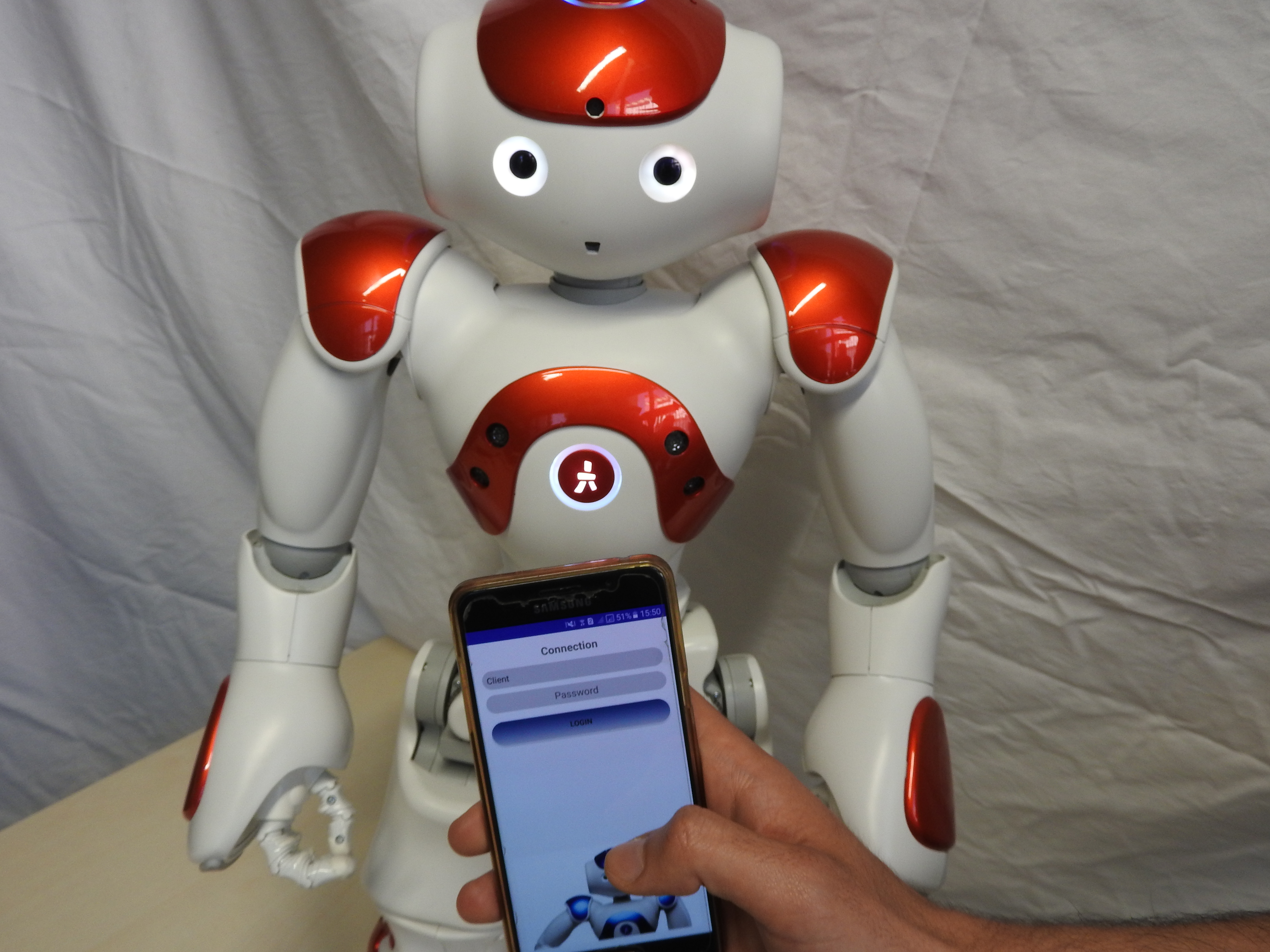
Via une application, l’utilisateur pourra commander les produits en fonction des stocks mis à jour en temps réel. Les informations parviendront au robot Nao qui communiquera le plan d’action aux humains et robots de l’entrepôt afin de répondre aux besoins dans les meilleurs délais.